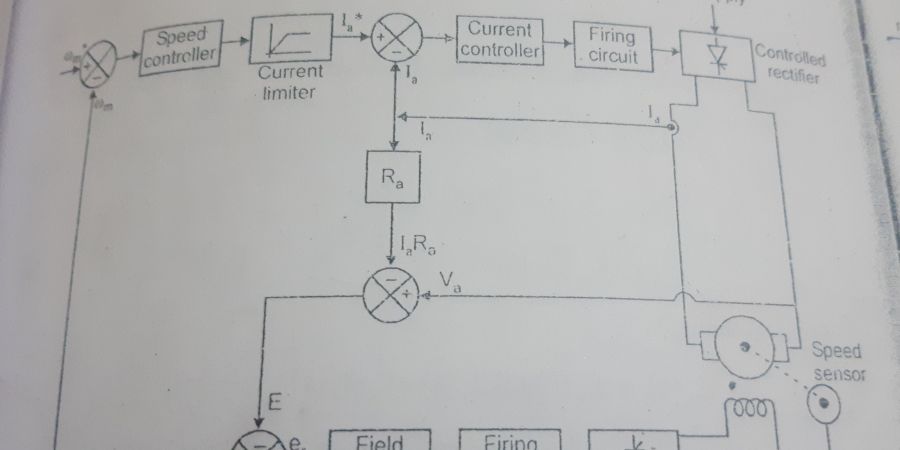
CLOSED LOOP SPEED CONTEOL SCHEME FOR ARMATURE VOLTAGE CONTROL AND FIELD WEAKENING CONTROL
The basic approaxh of closed loop speed control below amd above the speed is explained by the drive. The drive employed inner current control loop and outer speed loop. Such drive will operate at a constant field current and variable armature voltage below the base speed, and at aconstant armature voltage and variable field current above the base speed. Both armature and field are therefore, fed from fully controlled rectifiers.
Let us first examine the opreation below base speed. In the field control loop, the back emf ‘E’ is compared with a reference voltage E. Which is chosen to be between 0.85 to .95 of the rated armature voltge. The higher value is used for motors with low armature circuit resistance. For speeds below base speed, the field controller saturates due to large value of error ef.
The firing angle of filed rectifier af is maintained at zero applying rated voltage to the field. This ensures rated field current for motor operation below base speed
Any positive speed error caused by either an increase in the speed command or an increase in the load toeque produce a higher current reference Ia. The motor accelerates due to an increase in Ia to correct the speed error and finally settles at a new Ia, which makes the motor torque equal to the load torque and the speed error close to zero.
For any large positive speed error , the current limiter saturated and the current reference Ia is limited to a value Iam and the drive current is not allowed to exceed the maximum permissible value.
The speed error is corrected at the maximum permissible armature current until the speed error becomes small and the current limiter comes out of saturation. Now, the speed is increased again making speed error positive the charged PI controller takes longer time to respond.
Let us now examine the operation above base speed. When close to the close speed is almost near the rated value and the field controller comes out of saturation. For a speed command above base speed the speed error causes a higher value of Va.
The motor acceleration E increase field error ef decreases reducing the field current. Thus the motor speed continues to decrease until the motor speed becomes equal to the reference speed. Thus, the speed control above the base speed obtained by field control with the armature voltage maintained near the rated value.